News
- 06/2026: I successfully defended my PhD Thesis!
- 04/2026: Visited UC San Diego, UC Berkeley, and Stanford for invited talks
- 01/2026: A paper on outdoor semantic navigation, RAVEN, was accepted to ICRA 2026. See you at Vienna!
- 09/2025: I started research internship at Field AI.
- 06/2025: Two papers, RayFronts and PIPE Planner, were accepted to IROS 2025.
- 05/2025: Attended ICRA 2025 to present MapEx. Also participated in ICRA 2025 Doctoral Consortium.
- 12/2024: I passed my PhD Thesis Proposal! You can watch the recording of my presentation here.
- 05/2024: Attended ICRA 2024 and presented my work on multi-robot exploration.
- 12/2023: Survey on foundation models and robotics was released. Check out here!
- 11/2023: Attended CoRL 2023. Here are the notes on the sessions that I joined.
- 07/2022: Two papers on few-shot object detection were accepted at ECCV 2022 and IROS 2022.
- 09/2020: Started PhD in Robotics at Carnegie Mellon University!
|
Invited Talks
-
3D Representations for Robotics: Geometry, Efficiency, and Semantics
Guest Lecture, CS479: Machine Learning for 3D Data @ KAIST (hosted by Minhyuk Sung, May 2026)
-
Predictive Semantic World Models for Long-Horizon Mobile Robot Autonomy
CogAI Group @ Stanford (hosted by Jiajun Wu, Apr 2026)
-
Predictive Semantic Foresight for Mobile Robot Autonomy
Kanazawa AI Research Lab @ UC Berkeley (hosted by Angjoo Kanazawa, Apr 2026)
Co-PI Seminar on Optimization, Control, and Learning @ UCSD (hosted by Nikolay Atanasov, Apr 2026)
Interactive and Trustworthy Robotics Lab @ CMU (hosted by Andrea Bajcsy, Apr 2026)
-
Predictive Mapping and Semantic Reasoning for Autonomous Mobile Robots
Scalable Spatial Intelligence Lab @ U Michigan (hosted by Yulun Tian, Mar 2026)
Robot Learning Seminar @ U Buffalo / Georgia Tech / Penn State (hosted by Chen Wang, Mar 2026)
-
Spatial Reasoning and Semantic Representations for Intelligent Multi-Robot Exploration and Navigation
Artificial Intelligence for Robot Coordination at Scale Lab @ CMU (hosted by Jiaoyang Li, Jul 2025)
Resilient Intelligent Systems Lab @ CMU (hosted by Wennie Tabib, Nov 2024)
|
|
SuperMap: A Spatio-Temporal SLAM System for Visual-Language Navigation
Shibo Zhao*, Guofei Chen*, Honghao Zhu, Zhiheng Li, Changwei Yao, Nader Zantout,
Seungchan Kim, Wenshan Wang, Ji Zhang, Sebastian Scherer
Robotics: Science and Systems (RSS) 2026
paper |
project page |
video
|
|
PRoID: Predicted Rate of Information Delivery in Multi-Robot Exploration and Relaying
Seungchan Kim, Seungjae Baek, Micah Corah, Graeme Best, Brady Moon, Sebastian Scherer
arXiv preprint arXiv:2604.10433 (2026). Under Review
paper |
arXiv
|

|
RADSeg: Unleasing Parameter and Compute Efficient Zero-Shot Open-Vocabulary Segmentation Using Agglomerative Models
Omar Alama*, Darshil Jariwala*, Avigyan Bhattacharya*, Seungchan Kim, Wenshan Wang, Sebastian Scherer
IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR) 2026 Findings
CVPR 2026 Workshop on Open-World 3D Scene Understanding and Representations
paper |
arXiv |
project page |
code
|
|
RAVEN: Resilient Aerial Navigation via Open-Set Semantic Memory and Behavior Adaptation
Seungchan Kim, Omar Alama, Dmytro Kurdydyk, John Keller, Nikhil Keetha, Wenshan Wang, Yonatan Bisk, Sebastian Scherer
IEEE International Conference on Robotics and Automation (ICRA) 2026
(Oral Presentation, 8.3% of Accepted Papers)
IROS 2025 Active Perception Workshop, Best Paper Finalist (Spotlight Presentation)
paper |
arXiv |
project page |
code |
video |
presentation video
|
|
MapExRL: Human-Inspired Indoor Exploration with Predicted Environment Context and Reinforcement Learning
Narek Harutyunyan*, Brady Moon*, Seungchan Kim, Cherie Ho, Adam Hung, Sebastian Scherer
IEEE International Conference on Advanced Robotics (ICAR) 2025
ICRA 2025 Workshop on Structured Learning for Efficient, Reliable, and Transparent Robots
paper |
arXiv |
project page |
DOI |
video
|

|
RayFronts: Open-Set Semantic Ray Frontiers for Online Scene Understanding and Exploration
Omar Alama, Avigyan Bhattacharya, Haoyang He, Seungchan Kim, Yuheng Qiu, Wenshan Wang, Cherie Ho, Nikhil Keetha, Sebastian Scherer
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2025
RSS 2025 Workshop on Semantic Reasoning and Goal Understanding in Robotics
RSS 2025 Workshop on Learned Robot Representations
paper |
arXiv |
project page |
code |
DOI |
video
|
|
PIPE Planner: Pathwise Information Gain with Map Predictions for Indoor Robot Exploration
Seungjae Baek*, Brady Moon*, Seungchan Kim*, Muqing Cao, Cherie Ho, Sebastian Scherer, Jeong hwan Jeon
(*: Equal Contributions)
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2025
paper |
arXiv |
project page |
code |
DOI |
video
|
|
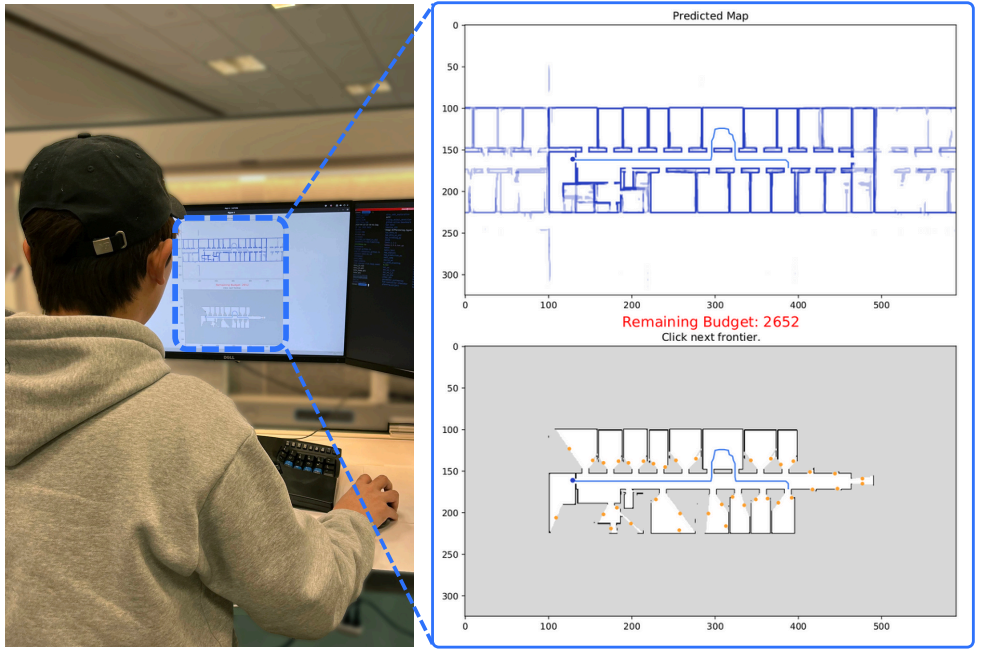
MapEx: Indoor Structure Exploration with Probabilistic Information Gain from Global Map Predictions
Cherie Ho*, Seungchan Kim*, Brady Moon, Aditya Parandekar, Narek Harutyunyan, Chen Wang, Katia Sycara, Graeme Best, Sebastian Scherer
(*: Equal Contributions)
IEEE International Conference on Robotics and Automation (ICRA) 2025
paper |
arXiv |
project page |
code |
DOI |
video |
presentation video
|
|
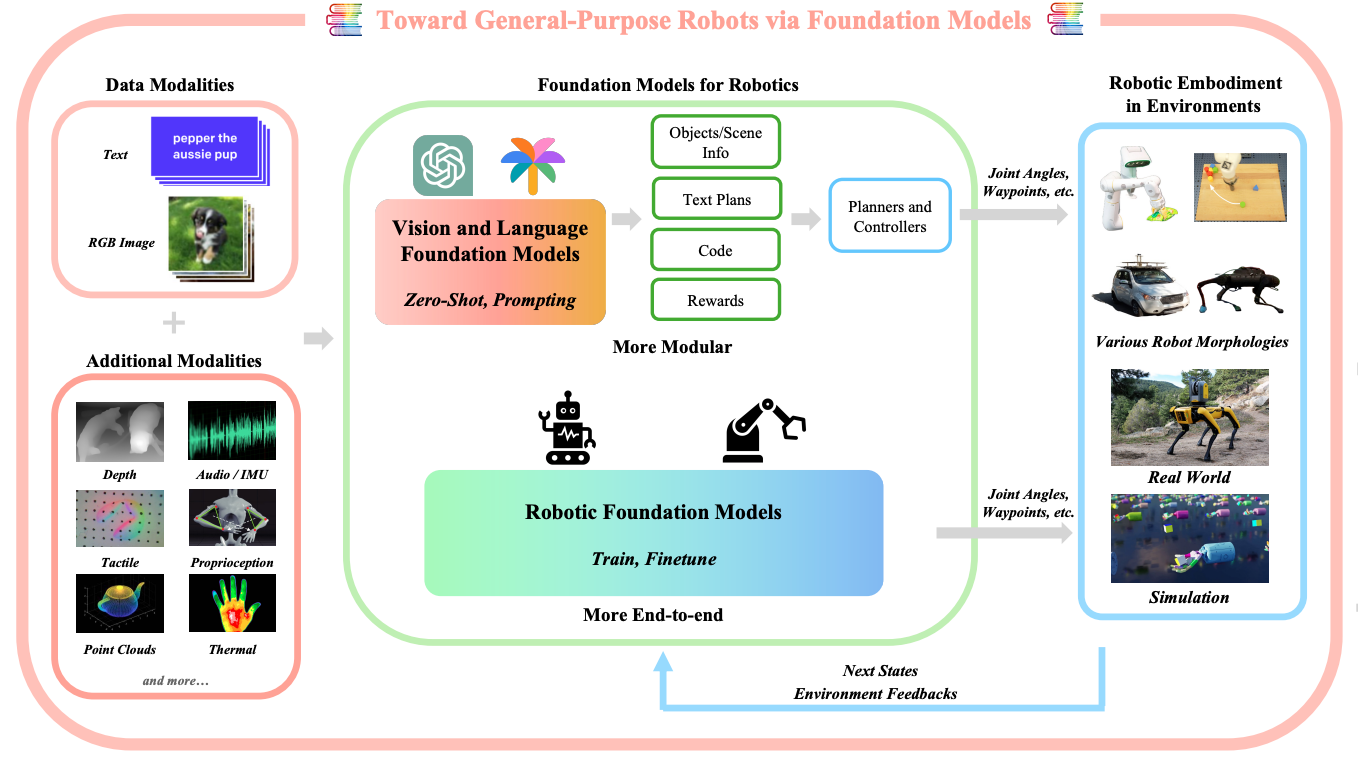
Toward General-Purpose Robots via Foundation Models: A Survey and Meta-Analysis
Yafei Hu*, Quanting Xie*, Vidhi Jain*, Jonathan Francis, Jay Patrikar, Nikhil Keetha, Seungchan Kim, Yaqi Xie, Tianyi Zhang, Hao-Shu Fang, Shibo Zhao, Shayegan Omidshafiei, Dong-Ki Kim, Ali-akbar Agha-mohammadi, Katia Sycara, Matthew Johnson-Roberson, Dhruv Batra, Xiaolong Wang, Sebastian Scherer, Chen Wang, Zsolt Kira, Fei Xia, Yonatan Bisk
arXiv preprint arXiv:2312.08782 (2023).
paper |
arXiv |
project page
|

|
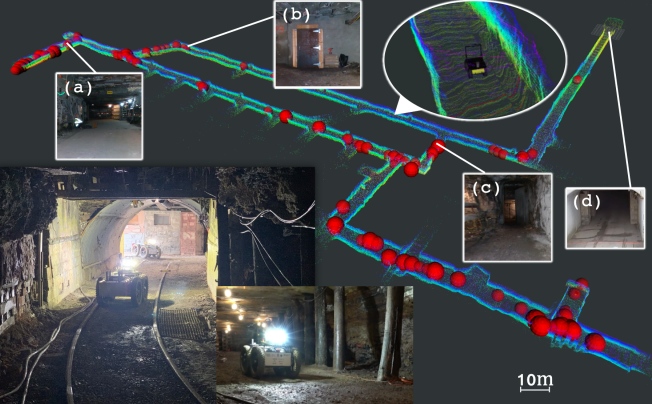
Multi-Robot Multi-Room Exploration with Geometric Cue Extraction and Circular Decomposition
Seungchan Kim, Micah Corah, John Keller, Graeme Best, Sebastian Scherer
IEEE Robotics and Automation Letters (RA-L) 2023
Presentation at IEEE International Conference on Robotics and Automation (ICRA) 2024
paper |
arXiv |
project page |
DOI |
video |
presentation video
|
|
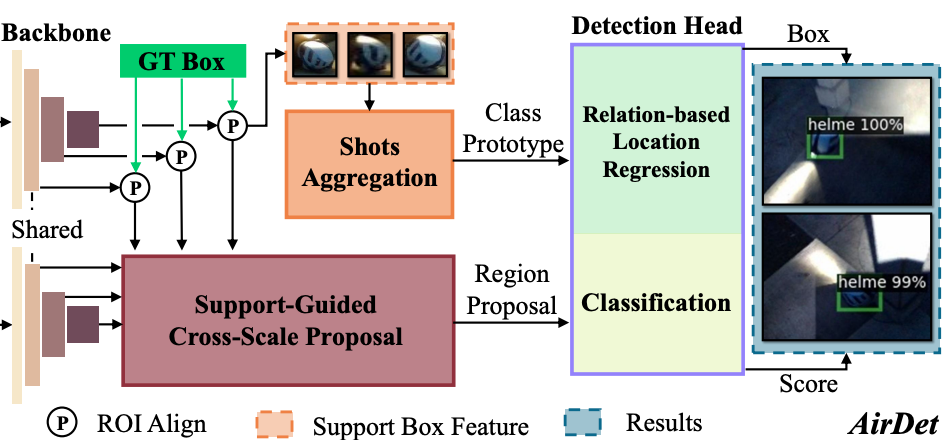
AirDet: Few-Shot Detection without Fine-tuning for Autonomous Exploration
Bowen Li, Chen Wang, Pranay Reddy, Seungchan Kim, Sebastian Scherer
European Conference on Computer Vision (ECCV) 2022
paper |
arXiv |
project page |
code |
DOI
|
|
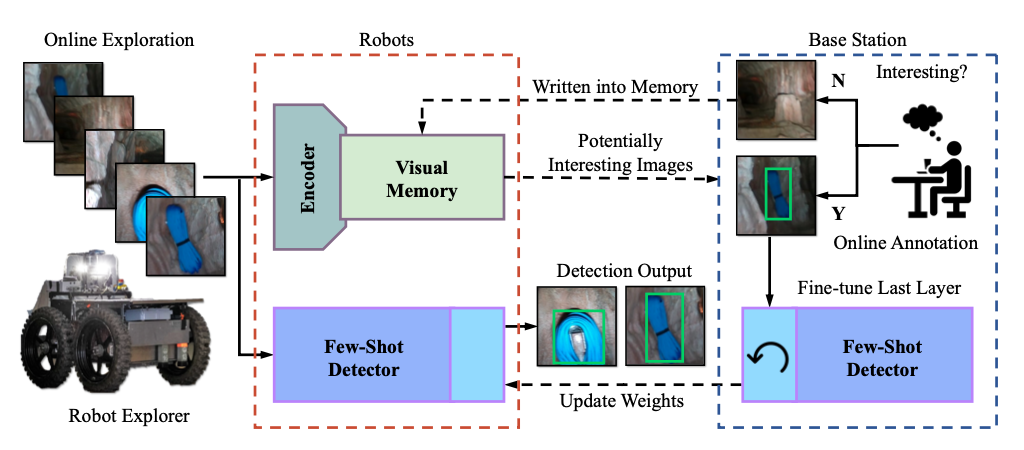
Robotic Interestingness via Human-Informed Few-Shot Object Detection
Seungchan Kim, Chen Wang, Bowen Li, Sebastian Scherer
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2022
paper | arXiv | DOI | video
|
|
Unsupervised Online Learning for Robotic Interestingness with Visual Memory
Chen Wang, Yuheng Qiu, Wenshan Wang, Yafei Hu, Seungchan Kim, Sebastian Scherer
IEEE Transactions on Robotics (T-RO) 2021
paper | arXiv | project page | code | DOI
|

|
Using Computational Analysis of Behavior to Discover Developmental Change in Memory-Guided Attention Mechanisms in Childhood
Dima Amso, Lakshmi Govindarajan, Pankaj Gupta, Diego Placido, Heidi Baumgartner, Andrew Lynn, Kelley Gunther, Tarun Sharma, Vijay Veerabadran, Kalpit Thakkar, Seungchan Kim, Thomas Serre
PsyArXiv. doi:10.31234/osf.io/gq4rt
DOI
|
|
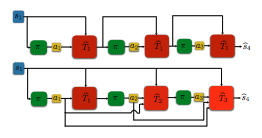
Combating the Compounding-Error Problem with a Multi-step Model
Kavosh Asadi, Dipendra Misra, Seungchan Kim, Michael Littman
arXiv preprint arXiv:1905.13320 (2019).
paper | arXiv
|
|
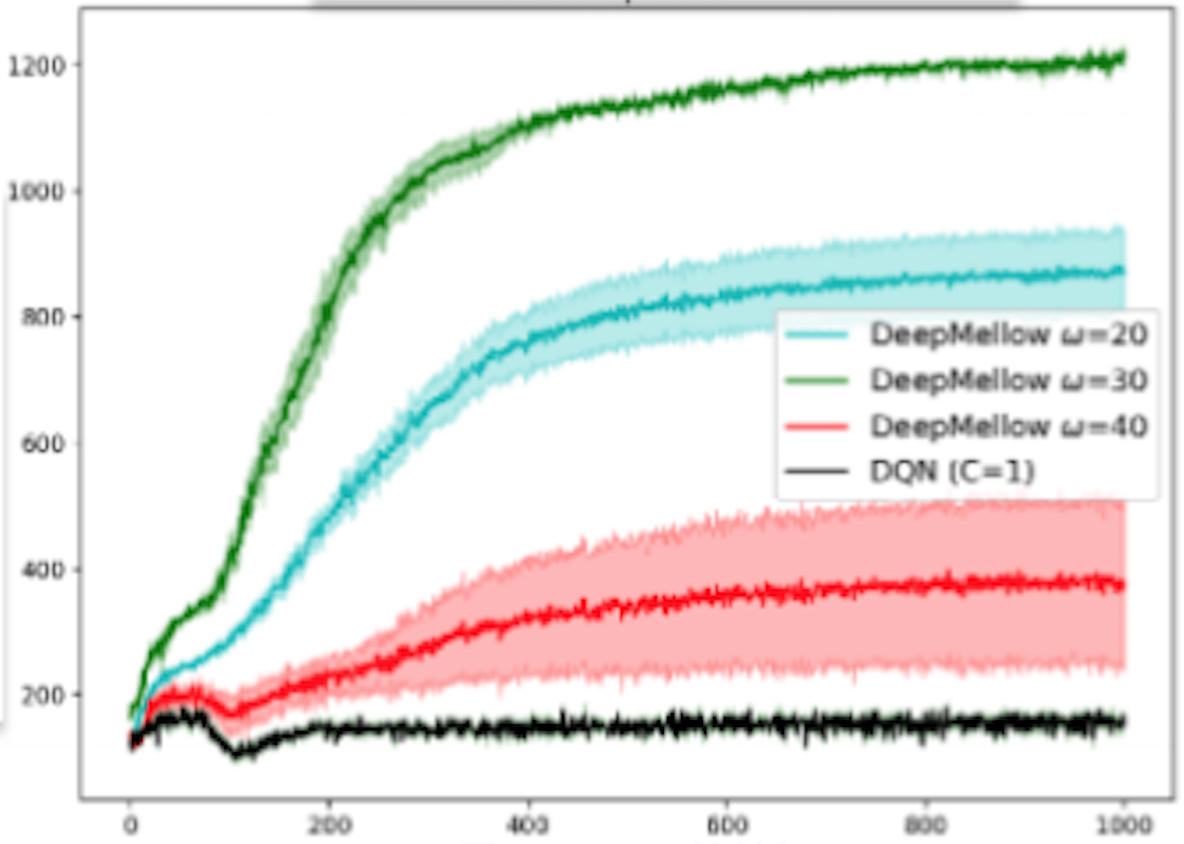
DeepMellow: Removing the Need for a Target Network in Deep Q-Learning
Seungchan Kim, Kavosh Asadi, Michael Littman, George Konidaris
International Joint Conference on Artificial Intelligence (IJCAI) 2019
Multidisciplinary Conference on Reinforcement Learning and Decision Making (RLDM) 2019
paper | code | DOI
|

|
Removing the Target Network from Deep Q-Networks with the Mellowmax Operator
Seungchan Kim, Kavosh Asadi, Michael Littman, George Konidaris
International Conference on Autonomous Agents and Multiagent Systems (AAMAS) 2019, Extended Abstract
paper
|
Carnegie Mellon University Robotics Institute
16-711 Kinematics, Dynamics, Control, Teaching Assistant, Spring 2023
16-833 Robot Localization and Mapping, Teaching Assistant, Spring 2022
Brown University
CSCI1430 Computer Vision, Teaching Assistant, Spring 2019
CSCI0040 Intro to Scientific Computing and Problem Solving, Teaching Assistant, Spring 2015
|
Organizer:
Reviewer: IJRR, T-ASE, RA-L, ICRA, IROS, CoRL, CASE, MRS, ICAR, ICLR, NeurIPS, AAAI, ICML
|
|
